Command modes
330
1. Introduction
The user can choose between two types of command modes:
-
The Maximum Torque Per Voltage (MTPV)
-
The Maximum Torque Per Amps (MPTA)
Whatever is the command mode applied, the first step of the process consists of computing the Torque-speed curve (curve which bounded the domain) and the second step is to compute maps bounded by the Torque-speed curve (Efficiency maps, Iron loss maps…).
|
|
Torque-speed curve and efficiency map |
2. Maximum Torque Per Voltage command mode (MTPV)
2.1 Positioning and objective
The Maximum Torque Per Voltage command mode (MTPV) allows to compute the torque-speed curve which corresponds to the maximum potential of mechanical torque (or mechanical power) of a motor from the base speed point to the maximum speed point.
This command mode shows the full potential of the machine, but it is also the most difficult command mode to implement in terms of control and drive.
When this command is chosen, it is used to compute the torque speed curve from the base speed point to the maximum speed.
Upstream the base speed point, the torque speed curve is obtained by imposing the useful torque computed at the base speed point and by maximizing the efficiency.
The maps bounded by the considered torque-speed curve are computed by maximizing the efficiency for each paired values (Torque, Speed).
|
|
Torque speed curve with MTPV command mode |
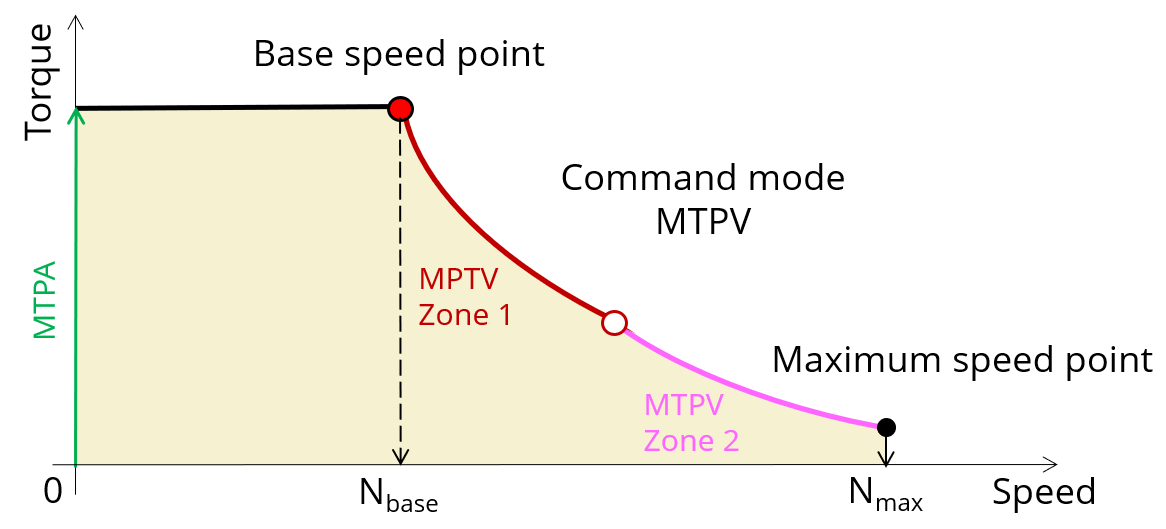
Over the speed range [Nbase, Nmax.] we distinguish two main zones, the Zone 1 commonly called “Flux weakening” and the Zone 2 commonly called “MTPV curve”.
|
|
Evaluation of the working point in Jd-Jq plane by considering iso-torque, iso-current and iso-voltage |
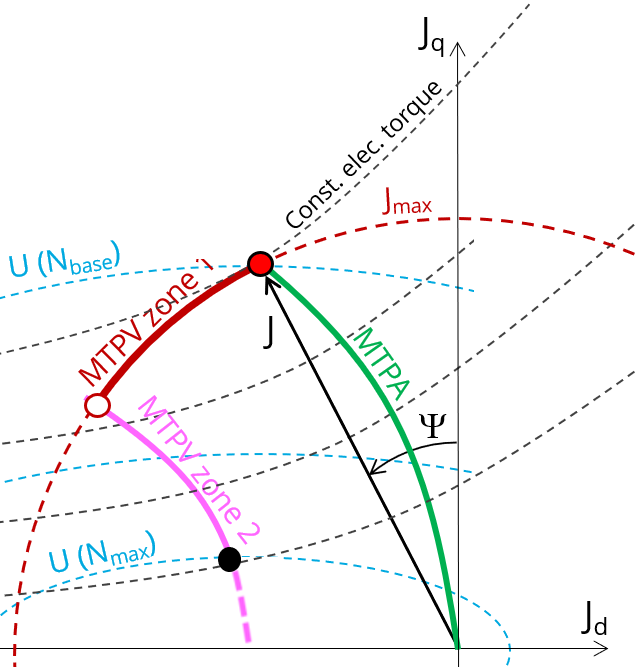
In the first zone (MTPV zone 1), the maximization of the mechanical torque for a given speed is reached by keeping the maximum values of voltage and current, and by driving the control angle (Ψ).
U = Umax
I = Imax
In a second zone (MTPV zone 2), the maximization of the mechanical torque is reached by keeping the maximum values of voltage and by decreasing the line current below the maximum allowed value, and by driving the control angle (Ψ).
U = Umax
I < Imax
In Altair FluxMotorTM, MTPV label is used to mention the combination of these two zones (for both, the maximum torque is computed, at the maximum voltage available. The optimization process automatically deduces the best working zone according to the following constraints:
U = Umax
I ≤ Imax
Note: The MTPV zone 2 is available only for motors which have, in D-Q current area, their iso-voltage ellipse center located inside the iso-current circle corresponding to the maximum value of current.
With MTPV command mode the mechanical power is not imposed over the speed range [Nb, Nmax.] as commonly done.
In fact, over Zone 1 and Zone 2 the MTPV command mode imposes to maximize the mechanical torque at maximum voltage. Maximizing the mechanical torque at imposed speed is equivalent to maximizing the mechanical power.
In conclusion, the MTPV command mode allows to spotlight the potential of mechanical power that the machine can provide over a speed range from the base speed point to the maximum speed point with a given maximum line-line voltage and a maximum line current.
|
|
Mechanical power with MTPV command mode |
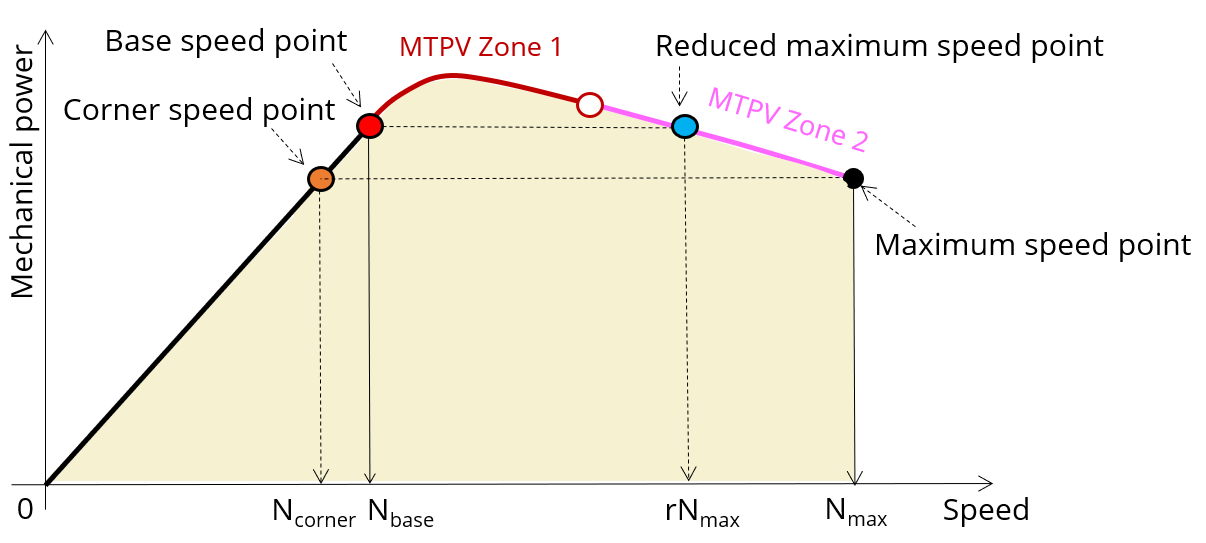
Thanks to the MTPV results we can easily deduce the maximum mechanical power that the machine is able to provide over a range of speed.
For examples, referring to the previous figure:
-
If we want to impose the mechanical power obtained at the maximum point speed, we can easily deduce the bound at low speed. We called this point as corner speed point (Orange point on the previous figure).
-
If we want to impose the mechanical power obtained at the based speed point, we are able to deduce the bound at high speed. We called this point as reduced maximum speed point (Blue point on the previous figure).
Note: The corner point is equal to the base speed point when the mechanical power at maximum speed is equal to the mechanical power we get for the base speed.
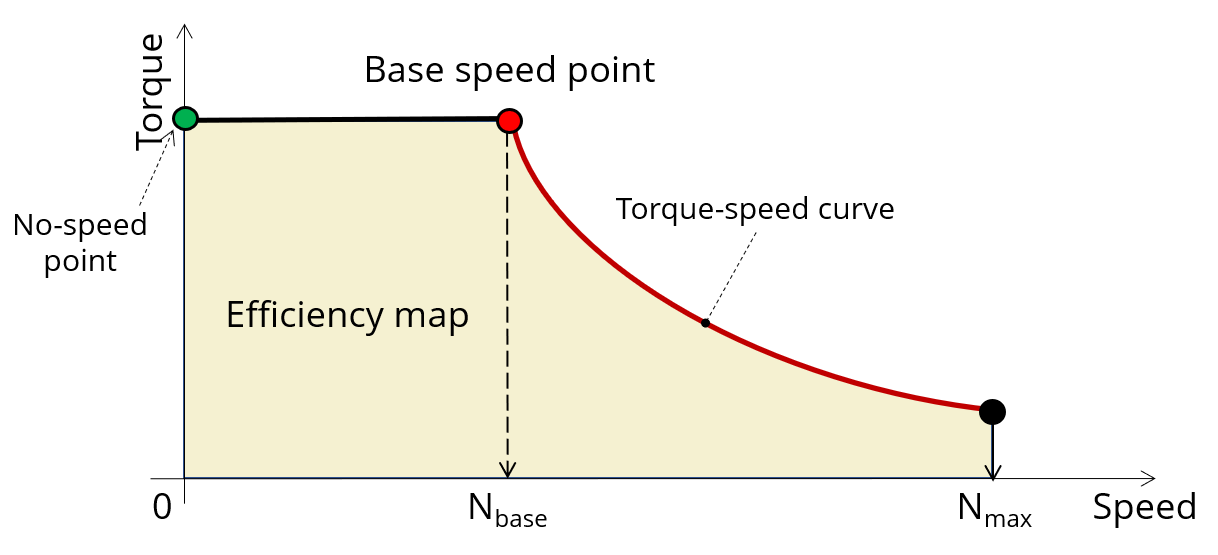
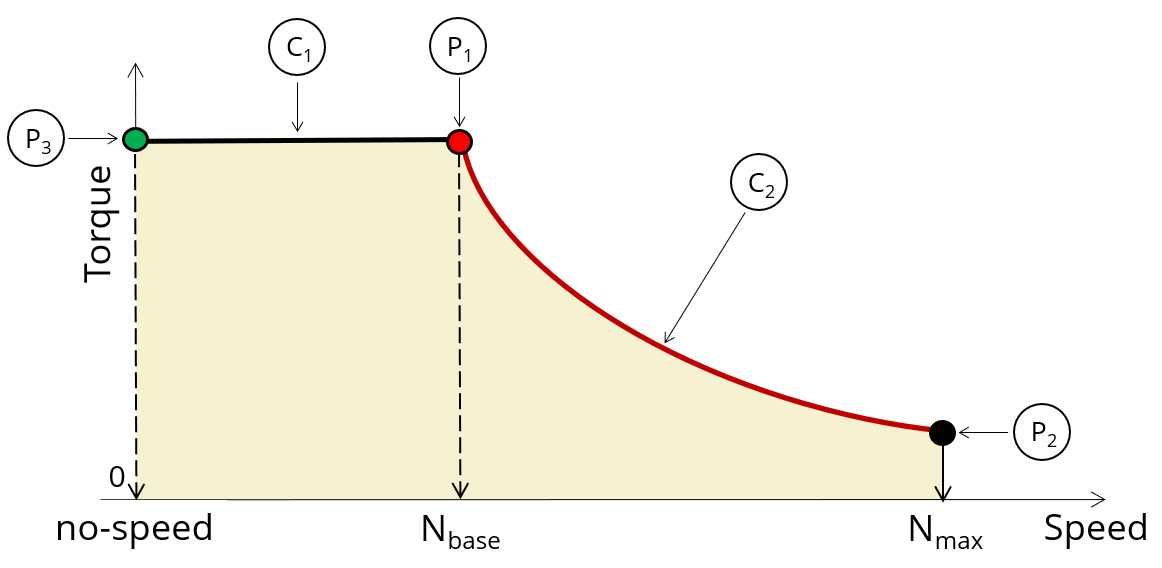
2.2 Torque-speed curve – Computation and displaying
a) Base speed point
The first step consists of computing the base point (red point on the image shown below).
The target is to find the maximum reachable torque (Tmax) considering:
-
The maximum allowed Line-Line voltage (U = U max)
-
The maximum allowed line current (I = Imax)An optimization process is used and the variable parameters are the speed (N), the D-axis and the Q-axis components of the phase current (Jd, Jq).
b) Maximum speed point
The second step consists of verifying that the maximum speed set by the user is reachable (black point on the image shown below).
The target is to find the maximum reachable torque (Tmax) considering:
-
The maximum allowed Line-Line voltage (U = U max)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)
-
The maximum speed set by the user (N=Nmax.)
An optimization process is used and the variable parameters are the D-axis and the Q-axis components of the phase current (Jd, Jq).
If the user maximum speed is reachable, the used optimization process reaches convergence and the torque-speed curve identification process continues.
Sometimes, the maximum speed set by the user is not reachable by the machine.
With the MTPV command mode, the maximum speed depends on the characteristics of the motor, and especially on its capabilities for operating in the flux weakening zone. In this case, a computation of a reachable maximum speed is automatically done.
If the maximum speed indicated by the user is not reachable by the machine, an automatic correction is performed.
In that case, the target is to find the maximum reachable speed considering:
-
Line-Line voltage equal to the maximum allowed value (U = Umax.)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax.)
-
The mechanical torque obtained at the base speed divided by ten (T = T(Nb)/10)
The variable parameters are the speed (N), the D-axis and the Q-axis components of the phase current (Jd, Jq).
c) No speed working point
The third step consists to compute the no-speed working point (Green point in the image shown below).
The target is to find the maximum reachable efficiency for the machine by considering:
-
Line-Line voltage less than or equal to the maximum allowed value (U ≤ U max)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)
-
A null speed
-
Imposed torque equal to the base speed torque (T=T(Nb)) if Nb < Nmax. or equal to the maximum speed torque (T = T(Nmax.)) if Nb > Nmax.
An optimization process is used and the variable parameters are the D-axis and the Q-axis component of the phase current (Jd, Jq).
Note: At zero speed, losses match exactly with Joule losses. In that case, one can consider that MTPA is applied (Green point in the image shown below).
d) Torque-speed curve in the range ]0, Nb[
The base speed, the maximum speed and the no-speed working points being fixed, the fourth step consists of computing the part of the torque-speed curve where the torque is constant (Black line in the image shown below).
The target is to find the maximum reachable efficiency for the machine by considering:
-
Imposed torque equal to the base speed torque T=T(Nb) if Nb < Nmax. or T = T(Nmax.) if Nb > Nmax.
-
Imposed speed with N Î ]0, Nb[
-
Line-Line voltage less than or equal to the maximum allowed value (U ≤ U max)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)
The variable parameters are the D-axis and the Q-axis components of the phase current (jd, jq).
e) Torque speed curve in the range] Nb, Nmax [
Then, the last step consists of computing the torque-speed curve over the speed range] Nb, Nmax [ (red curve in the image shown below). This step is done only when Nb < Nmax.
The target is to find the Maximum reachable torque by considering:
-
Imposed speed with NÎ]Nb , Nmax [
-
Line-Line voltage equal to the maximum allowed value (U = Umax)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)An optimization process is used and the variable parameters are the D-axis and the Q-axis components of the phase current (Jd, Jq).
|
|
||
MTPV command modes – Torque-speed curve computation process |
||
| P1 | Base speed point | Target: Maximum torque (Tmax) |
| Constraints | I = Imax,U=Umax, | |
| Variable parameters | Jd, Jq, Speed (N) | |
| P2 | Max. speed point | Target: Maximum torque (Tmax) |
| Constraints | I ≤ ImaxU=UmaxSpeed = Maximum speed (Nmax.) | |
| Variable parameters | Jd, Jq | |
| P3 | Null speed point | Target: maximum efficiency |
| Constraints | I ≤ ImaxU ≤ UmaxSpeed = N = 0Torque = base speed torque (T(Nb)) | |
| Variable parameters | Jd, Jq | |
| C1 | Low speed zone | Target: maximum efficiency |
| Constraints | I ≤ ImaxU ≤ UmaxSpeed ∈ ]0, Nb[Torque = base speed torque (T(Nb)) | |
| Variable parameters | Jd, Jq | |
| C2 | High speed zone | Target: maximum torque (Tmax) |
| Constraints | I ≤ ImaxU = UmaxSpeed N ∈]Nb, Nmax.[ | |
| Variable parameters | Jd, Jq | |
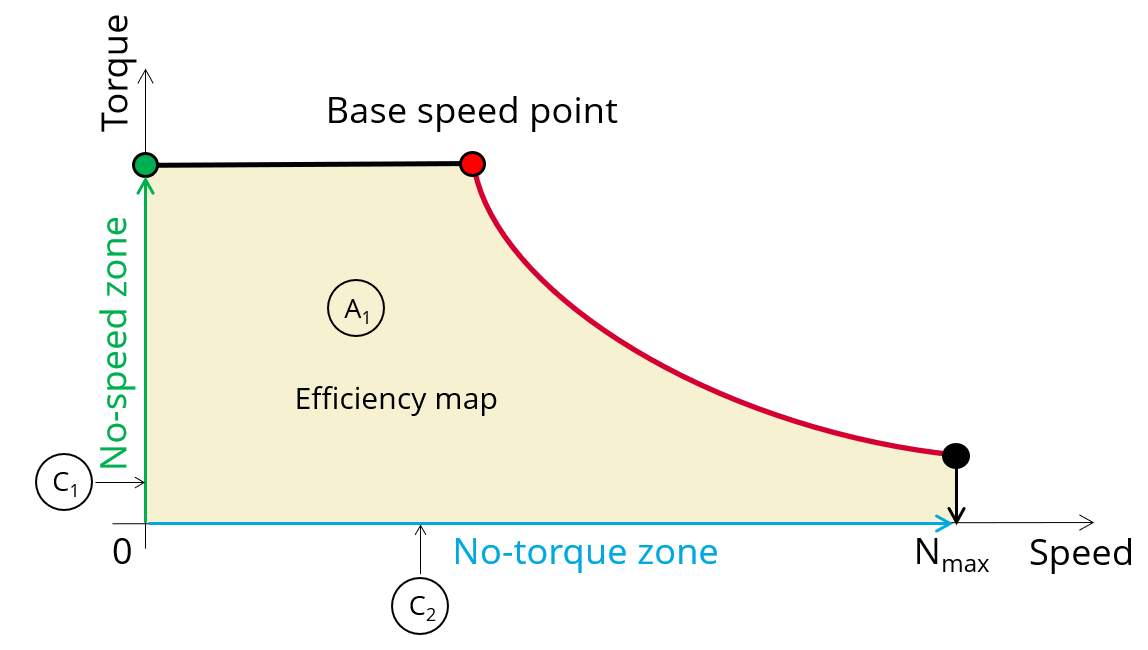
2.3 Computation and displaying maps
Evaluating the maps for all the electromagnetic quantities consists of computing the machine performance for each node of a grid bounded by the torque-speed curve (Yellow part in the image shown below).
a) Maps at no-speed
At no-speed losses match exactly with Joule Losses. One can consider that MTPA command is applied.
In that case, the target is to minimize the Joule losses by considering:
-
Line-Line voltage less than or equal to the maximum allowed value (U ≤ U max)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)
-
Speed = 0
-
Imposed torque by the user discretizationAn optimization process is used and the variable parameters are the D-axis and the Q-axis components of the phase current (Jd, Jq).
b) Maps at no torque
At zero torque, only iron losses and mechanical losses, which are depending of the speed, are computed. All other electromagnetic quantities are set to 0 (including efficiency).
c) Maps at no-speed and no-torque
When speed and torque are null all the quantities are equal to 0.
d) Maps in the range ]0, Nmax]
For each paired (torque, speed) working points, the target is to find the maximum reachable efficiency for the machine by considering:
-
Imposed speed with N ∈[0, Nmax]
-
Imposed torque with T ∈[0, Tb]
-
Line-Line voltage less than or equal to the maximum allowed value (U ≤ U max)
-
Line current less than or equal to the maximum allowed value (I ≤ I max)
An optimization process is used and variable parameters are the D-axis and the Q-axis components of the current (Jd, Jq).
Note: Usually, at low speed, the Joule losses dominate other types of losses. Considering this, at low speed results obtained with this process can be very close to results obtained with an MTPA command mode.
Note: the computation of efficiency integrates the Joule losses, iron losses, mechanical losses and additional losses (if used).
|
|
||
MTPV command modes – Efficiency map computation process |
||
| C1 | Null speed zone | Target: Minimum Joule losses |
| Constraints | I ≤ Imax,U ≤ Umax,Speed N = 0User torque (got by user’s discretization) | |
| Variable parameters | Jd, Jq | |
| C2 | Null torque zone | |
| Only iron losses and mechanical losses are computed All other quantities are set to 0, even the efficiency. | ||
| A1 | Efficiency map | Target: Maximum efficiency |
| Constraints | I ≤ ImaxU ≤ UmaxTargeted speed (got by user’s discretization)Targeted torque (got by user’s discretization) | |
| Variable parameters | Jd, Jq | |
3. Maximum Torque Per Amps command mode – MTPA
3.1 Positioning and objective
The Maximum Torque Per Ampere command mode “MTPA” is one of the easiest to implement in terms of drive and control. That is why this command mode is still frequently used, especially for low cost applications.
In Altair FluxMotorTM, the “MTPA” command mode is applied to compute the torque-speed curve and maps mainly thanks to MTPA curves function of the speed. More details on the global process of computation are presented in the next section.
|
|
Torque speed curve with MTPA command mode |
In Altair FluxMotorTM, we consider not just one MTPA curve but as many MTPA curves as speed discretization imposed by the user.
In fact, mechanical torque is function of the current magnitude but also of the speed according to iron losses, mechanical losses, magnet losses (neglected in Altair FluxMotorTM) etc.
So, it is more rigorous to consider one MTPA curve for each speed.
|
|
Evaluation of the working point in Jd-Jq plane by considering iso-torque, iso-current and iso-voltage |
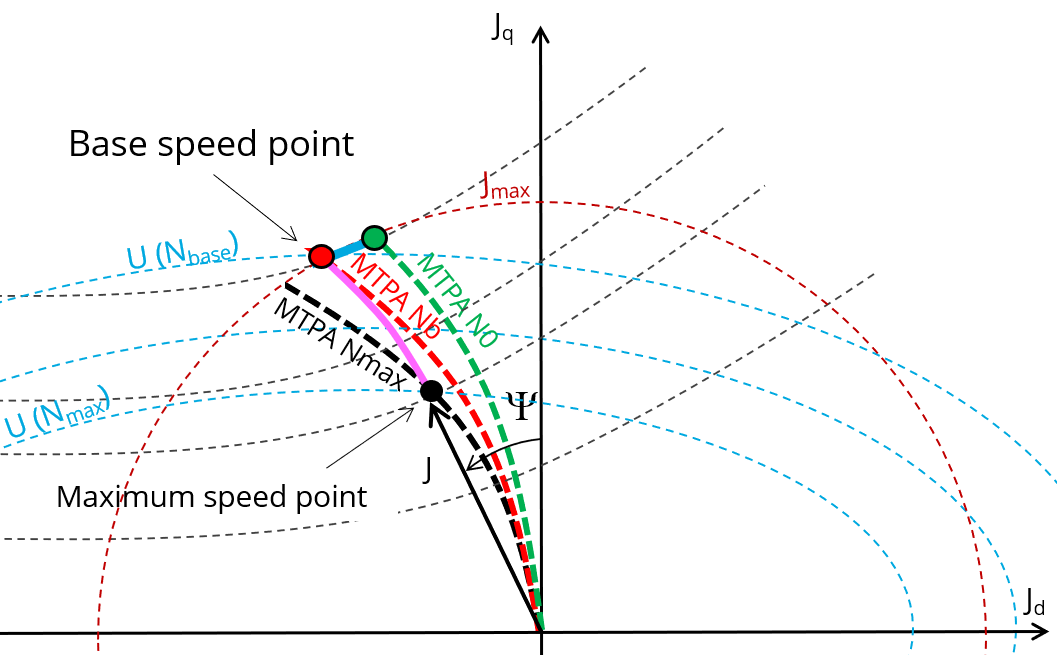
In most of the case, losses function of current and speed (iron losses, magnet losses…) are just some percent of total losses. For such cases, MTPA curves are very close each other.
For some cases, losses function of current and speed dominate, so, MTPA curves present significant variations each other as in the figure above.
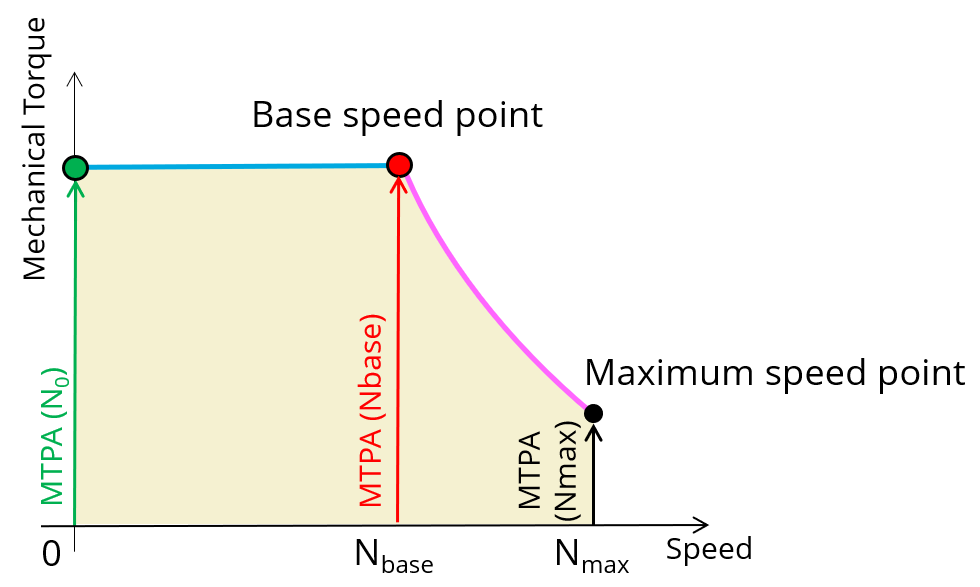
3.2 Torque-speed curve – Computation and displaying
a) Base speed point
The first step consists of computing the base speed point (Red point in the next image shown below).
The computation method is the same as the one which described for the MTPV command. In fact, the base speed point is the same in both the command: MTPV or MTPA.
The target is to find the maximum reachable torque (Tmax.) considering:
-
The maximum allowed line-line voltage (U = Umax)
-
The maximum allowed line current (I = Imax)
An optimization process is used (integrating MTPA curves) and the variable parameters are the speed N, the D-axis and the Q-axis component of the phase current (Jd, Jq).
b) Maximum speed point
The second step consists in verifying that the maximum speed set by the user (Nmax.) is reachable (black point in the image shown below).
The target is to find the maximum reachable torque (Tmax.) considering:
-
The maximum allowed Line-Line voltage (U = U max)
-
The maximum allowed line current (I ≤ Imax)
-
The maximum speed set by the user (N = Nmax)
An MTPA curve is used and variable parameters are the D-axis and the Q-axis components of the phase current (jd, jq). The identification is done by interpolation of data on MTPA curves.
When the user maximum speed is reachable, a working point will be found on the MTPA curve and the torque-speed curve identification process continues.
Sometimes, the maximum speed set by the user is unreachable by the machine according to its own limitation. In this case, a computation of a reachable maximum speed is automatically done.
A correction of the maximum speed could be performed if needed.
The target is to find the maximum reachable speed (Nmax) considering:
-
Line-Line voltage equal to the maximum allowed value (U = Umax)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)
-
The useful torque obtained at the base speed divided by ten (T = T(Nb)/10)
An optimization process is used (integrating MTPA curves) and variable parameters are the speed (N), the D-axis and the Q-axis components of the phase current (Jd, Jq).
c) Torque-speed curve in the range [0, Nb[
The base speed, the maximum speed and the no-speed working points being fixed, the third step consists of computing the part of the torque-speed curve where the torque is constant (Blue line in the image shown below).
The computation of operating points is done over [0, Nb] when Nb < Nmax. and over [0, Nmax.] when Nb > Nmax.
The target is to find the mechanical torque corresponding to the base speed T(Nb) on the different MTPA curves which are depending on the speed.
MTPA curves are used and variable parameters are the D-axis and the Q-axis components of the phase current (Jd, Jq). The identification is done by interpolation of data on MTPA curves (which are depending on the speed).
d) Torque-speed curve in the range ]Nb, Nmax [
Then, the last step consists of computing the torque-speed curve over the speed range ]Nb, Nmax[ (Pink line on the picture shown below).
This step is done only if Nb < Nmax.
The target is to find the maximum reachable mechanical torque (Tmax) considering:
-
Imposed speed with N∈]Nb, Nmax [
-
Line-line voltage equal to the maximum allowed value (U = Umax)
-
Line current less than or equal to the maximum allowed value (I ≤ Imax)
MTPA curves are used and variable parameters are the D-axis and the Q-axis components of the phase current (Jd, Jq). The identification is done by interpolation of data on MTPA curves (which are depending on the speed).
|
|
||
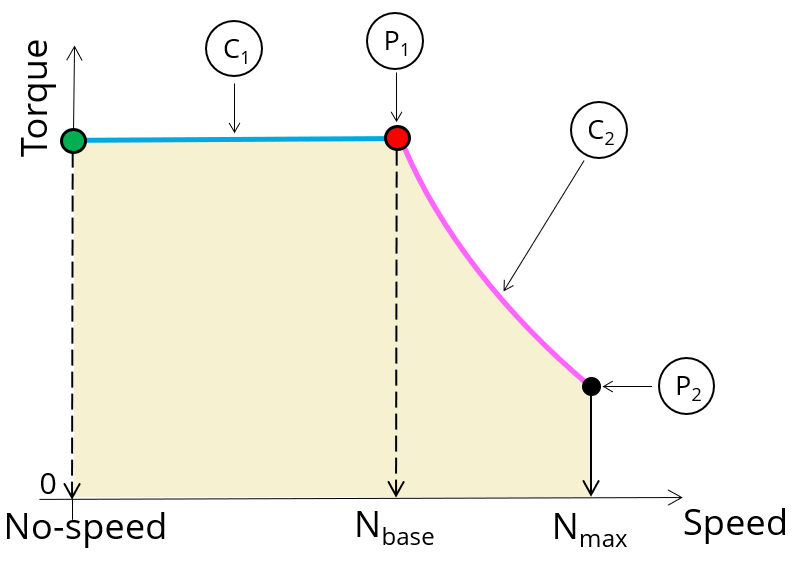
MTPA command modes – Torque-speed curve computation process |
||
| P1 | Base speed point | Target: Maximum mechanical torque Tmax. |
| Constraints | I = Imax,U=Umax, | |
| Variable parameters | Jd, Jq, Speed | |
| P2 | Max. speed point | Target: Maximum mechanical torque Tmax. |
| Constraints | I ≤ ImaxU=UmaxSpeed = Maximum speed | |
| Variable parameters | Jd, Jq | |
| C1 | Low speed zone | Target: Mechanical torque = Base speed torque T(Nb) |
| Constraints | I ≤ ImaxU ≤ UmaxSpeed = N ∈ [0, Nb[ | |
| Variable parameters | Jd, Jq | |
| C2 | High speed zone | Target: Maximum mechanical torque Tmax. |
| Constraints | I ≤ ImaxU = UmaxSpeed = N ∈ ]Nb, Nmax.[ | |
| Variable parameters | Jd, Jq | |
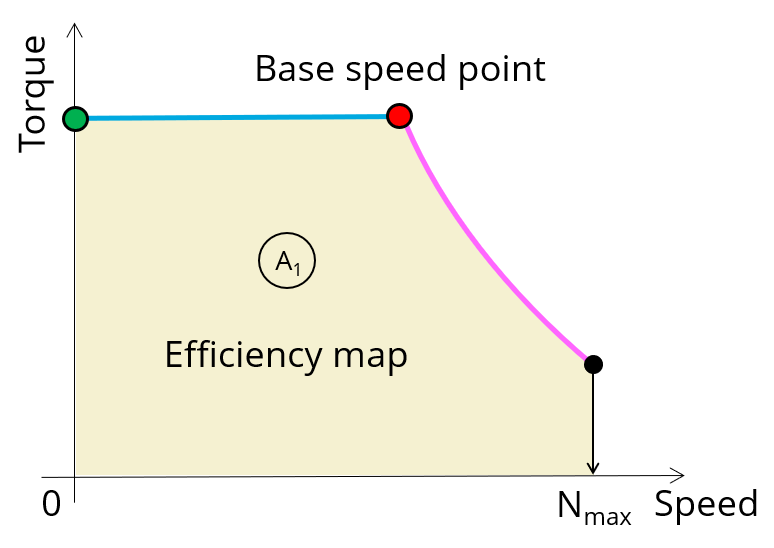
3.3 Computation and displaying of the efficiency map
Evaluating maps for all the electromagnetic quantities consists of computing the machine performances for each node of a grid bounded by the torque-speed curve. All working points defined by a value of torque and a value of speed are computed over [0, Tb] and [0, Nmax]. (Yellow part in the image shown below).
For each pair of “Torque - Speed” point, the target is to find the corresponding point on the corresponding MTPA curve:
-
Imposed speed with N ∈ [0, Nmax]
-
Imposed torque with T ∈ [0, Tb]
-
Line-Line voltage less than or equal to the maximum allowed value (U ≤ U max)
-
Line current less than or equal to the maximum allowed value (I ≤ I max)
MTPA curves are used and variable parameters are the D-axis and the Q-axis components of the phase current (Jd, Jq). The identification is done by interpolation of data on MTPA curves.
|
|
||
MTPA command modes – Efficiency map computation process |
||
| A1 | Efficiency map | Target: MTPA process |
| Constraints | I ≤ ImaxU ≤ UmaxT = Ttarget (got by user’s discretization)N = Ntarget (got by user’s discretization) | |
| Variable parameters | Jd, Jq | |